Trusted Autonomy for Rapidly Prototyped Uncrewed Ground Vehicles
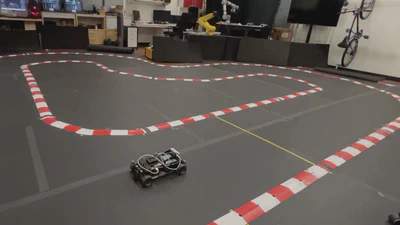
The Small Quick Integrated Ground Vehicle (SQUIG) vehicle is an autonomous ground vehicle currently under development by the Model Predictive Control (MPC) Lab at the University of …
•
3 min read