Safe Imitation Learning at Handling Limits
Nov 1, 2024
·
1 min read
Principal Researcher (Nov 2024 — Feb 2025)
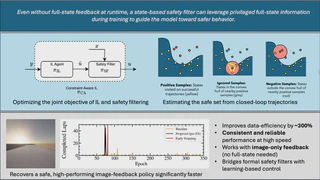
- Designed a constraint-aware imitation learning framework incorporating an actor-critic structure for explicit safety modeling.
- Improved training efficiency by 150% and reduced collision rates by 60% at the vehicle’s dynamic handling limits in CARLA simulation.
- Integrated reachability-based safety filters into the training pipeline, enabling safe policy generalization.
- Oral presentation at IEEE IROS 2025 for this work: “A Simple Approach to Constraint-Aware Imitation Learning with Application to Autonomous Racing”.
Tech: PyTorch, CasADi, CARLA, RL, MPC, optimization, safety-aware learning.

Authors
Shengfan Cao
(he/him)
PhD Researcher in Autonomous Driving & Robotics
PhD researcher with 3+ years of hands-on experience in autonomous driving and robotic systems, spanning safe learning, control, and end-to-end autonomy deployment. I am transitioning into industry to work where large-scale data and real-world constraints continuously shape and validate learning-based autonomous systems.