Continuous Offset-Based Coverage Paths for Planar Regions
May 11, 2022
·
1 min read
Undergraduate research project, 2022
Key ideas explored
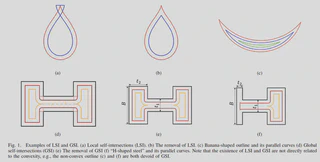
- A geometric distinction between local and global self-intersections in contour-parallel offset curves, and how they affect coverage continuity.
- Use of medial-axis width structure to reason about when offsetting causes a region to split, and how modifying width can prevent topological disconnection.
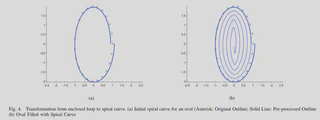
- A simple pre-processing technique that converts a family of offset loops into a single spiral-like continuous path.
- Identification of sharp-turn regions induced by offsetting and localized smoothing without globally altering equidistance.

Limitations and scope
- This work does not claim empirical superiority over existing infill or coverage strategies used in modern additive manufacturing.
- The approach prioritizes geometric continuity over material optimality, and is most relevant to contexts where uniform coverage and motion smoothness dominate.
- The algorithms are primarily geometric and exploratory; no large-scale benchmarking or hardware validation was performed.
In hindsight, this project shaped how I think about the relationship between geometric structure, modeling assumptions, and real-world relevance. Many of the limitations of this work informed my later focus on formally scoped, validated methods in safe learning and control.

Authors
Shengfan Cao
(he/him)
PhD Researcher in Autonomous Driving & Robotics
PhD researcher with 3+ years of hands-on experience in autonomous driving and robotic systems, spanning safe learning, control, and end-to-end autonomy deployment. I am transitioning into industry to work where large-scale data and real-world constraints continuously shape and validate learning-based autonomous systems.