Sampling-Based Constrained Policy Optimization
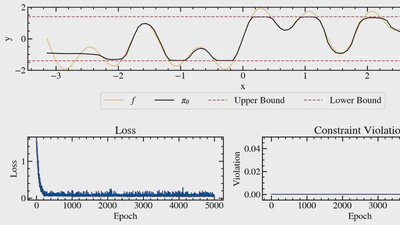
Proposed a sampling-based weight-space projection framework for enforcing safety constraints during policy updates.
•
1 min read
Proposed a sampling-based weight-space projection framework for enforcing safety constraints during policy updates.
Developed a vehicle dynamics simulator based on dynamic bicycle model with standard gymnasium APIs and a CARLA connector.
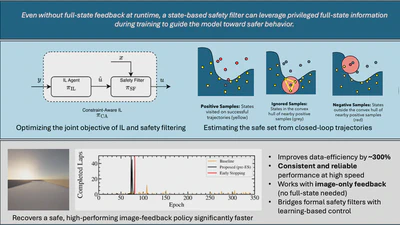
Designed a constraint-aware imitation learning framework incorporating an actor-critic structure for explicit safety modeling.

The Small Quick Integrated Ground Vehicle (SQUIG) vehicle is an autonomous ground vehicle currently under development by the Model Predictive Control (MPC) Lab at the University of …
Developed a CNN-based end-to-end controller for high-speed autonomous racing using RGB camera input and velocity feedback.
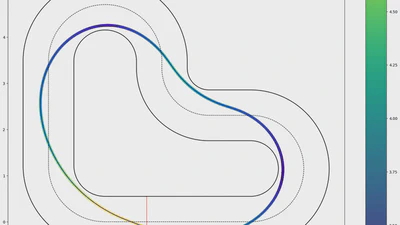
This project was conducted during my undergraduate studies as an exploration of geometric tool-path generation for planar coverage. Motivated by contour-parallel (offset curve) …