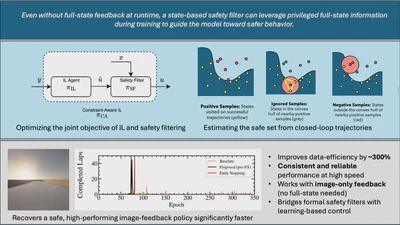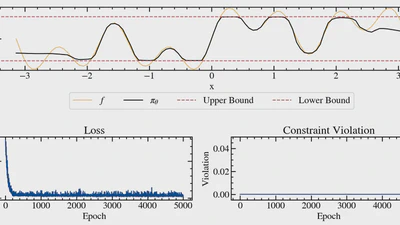
Constrained Policy Optimization via Sampling-Based Weight-Space Projection
Safety-critical learning requires policies that improve performance without leaving the safe operating regime. We study constrained policy learning where model parameters must …